The SPI protocol can be tricky enough to get working especially if you are unsure of the MCU you are using and/or the peripheral. Logic analyzers can help but can also be expensive. With the help of the following Energia MSP430G2553 code and a dumb terminal serial application program (on your PC) you can interact live with an SPI peripheral and hopefully come to grips with its operation.
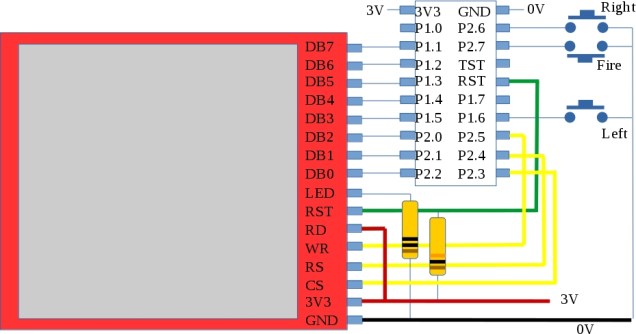
The peripheral can be wired as follows:

Launchpad Peripheral MOSI------------------------MOSI MISO------------------------MISO P1_0------------------------SS (slave select or CE) GND-------------------------GND Vcc-------------------------Vcc
Check the peripheral power requirements first and don’t connect a 5V peripheral directly to a 3.3V MSP430
The program presents the user with a simple menu:
Please select from one of the following: 0: SS Low 1: SS High 2: Write byte 3: Read byte
If you choose 0 or 1, SS is raised or lowered as appropriate and the menu recycles. If you choose 2 you see this (I entered the value ‘a9’ (not case sensitive))
Please select from one of the following: 0: SS Low 1: SS High 2: Write byte 3: Read byte Enter a 2 character hex value: a9 Out : A9 In : 0
If you choose 3 you will see something like this:
Please select from one of the following: 0: SS Low 1: SS High 2: Write byte 3: Read byte In : 0
The code is shown below. You will probably need to check out which SPI modes and byte ordering suit you. Also, the SPI interface is running at the very low speed of 125kHz. This was deliberate as it reduces the risk of data errors on shaky test leads and may help debugging. You can of course change this. The divider is divided into 16MHz to give an SPI data rate. This is very definitely version 0.1 and changes are likely in the future when I do some real testing.
/*
* SPI protocol tester using the MSP430G2553 G2 Launchpad
* This program allows you manage an SPI bus,write and read data
* using a serial dumb terminal application
* The program makes use of the Energia Serial and SPI libraries
* Serial interface : 9600,n,8,1
* SPI library reference : http://energia.nu/reference/spi/
*
*/
#include <SPI.h>
// Will use P1_0 as SS pin as there is a handy LED there on the launchpad
#define SS_Pin P1_0
int getUserCommand();
int getInteger(String Prompt);
void setup() {
// put your setup code here, to run once:
// Default SPI configuration : feel free to change!
// Set up the SS Pin and make it HIGH initially (low wakes up a slave)
pinMode(SS_Pin,OUTPUT);
digitalWrite(SS_Pin,HIGH);
SPI.begin();
SPI.setDataMode(SPI_MODE0); // can choose modes 0,1,2,3
SPI.setBitOrder(MSBFIRST); // can be MSBFIRST or LSBFIRST
SPI.setClockDivider(128); // assuming a system clock of 16MHz this gives an
// SPI speed of 125kHz - deliberately slow to be more forgiving and
// to make signals easier to see with a scope of logic analyser
// Serial communications to host setup
Serial.begin(9600);
}
int TXByte,RXByte;
void loop() {
// put your main code here, to run repeatedly:
switch (getUserCommand())
{
case 0 : {
// Command 0 : drop SS pin down
digitalWrite(SS_Pin,LOW);
break;
}
case 1 : {
// Command 1 : raise SS pin up
digitalWrite(SS_Pin,HIGH);
break;
}
case 2 : {
// Command 2 : send a byte
TXByte = getInteger("Enter a value to transmit: ");
RXByte = SPI.transfer(TXByte);
Serial.print("Out : ");
Serial.println(TXByte,HEX);
Serial.print("In : ");
Serial.println(RXByte,HEX);
break;
}
case 3 : {
// Command 3 : read a byte (send a dummy byte out)
RXByte = SPI.transfer(0x00);
Serial.print("In : ");
Serial.println(RXByte,HEX);
break;
}
default : {
Serial.println("Invalid choice");
}
}
delay(100);
}
int showMenu(String Menu[],int MenuItemCount)
{
Serial.flush();
Serial.println("Please select from one of the following:");
for (int item=0; item < MenuItemCount; item++)
{
Serial.print(item);
Serial.print(": ");
Serial.println(Menu[item]);
}
while(Serial.available()==0);
return Serial.read() - '0'; // assuming a numeric choice is made - convert to decimal from ascii
}
int getUserCommand()
{
String Menu[4];
Menu[0]="SS Low";
Menu[1]="SS High";
Menu[2]="Write byte";
Menu[3]="Read byte";
return showMenu(Menu,4);
}
int HexDigitToDecimal(char Digit)
{
if ( (Digit >= '0') && (Digit <= '9') )
{
return Digit - '0';
}
Digit = Digit | 32; // enforce lower case
if ( (Digit >= 'a') && (Digit <= 'f') )
{
return Digit - 'a' + 10;
}
return 0;
}
int getInteger(String Prompt)
{
char HexString[3];
int ReturnValue = 0;
HexString[2]=0;
Serial.flush();
Serial.print("Enter a 2 character hex value: ");
while(Serial.available()==0);
HexString[0]=Serial.read();Serial.print(HexString[0]);
while(Serial.available()==0);
HexString[1]=Serial.read();Serial.println(HexString[1]);
ReturnValue = HexDigitToDecimal(HexString[0]);
ReturnValue = ReturnValue << 4;
ReturnValue += HexDigitToDecimal(HexString[1]);
return ReturnValue;
}