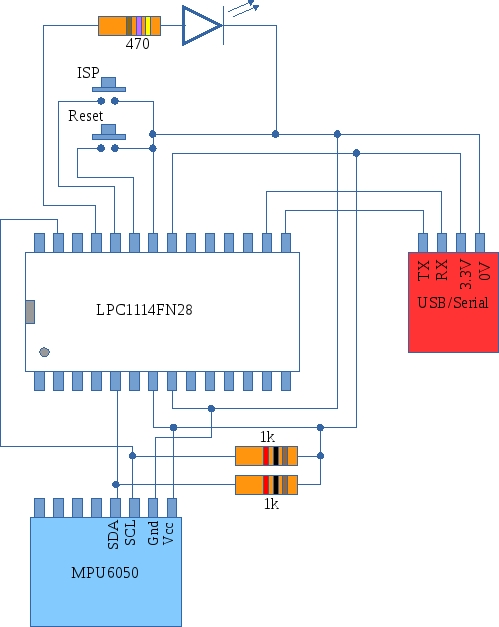
This project demonstrates how you might interface the MPU6050 accelerometer/gyroscope module with the LPC1114. The code is a little complex as two interrupt service routines are used: one for the I2C interface and one for the UART interface. A further complexity is the asynchronous nature of both communications interfaces. A “state-recorder” was used to help track down bugs during development. Further details and downloads are available here
- Comment
- Reblog
-
Subscribe
Subscribed
Already have a WordPress.com account? Log in now.
