This example was developed in the mbed online compiler. It makes some use of the mbed libraries but goes beyond them to manage interrupts and complimentary PWM outputs.
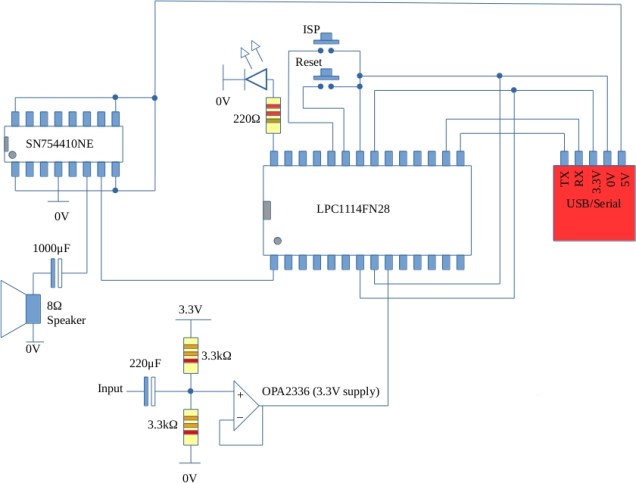
The switching frequency is 10kHz and the modulating frequency is 50Hz. This example was used to drive a H-bridge with a speaker connected as load. The interesting part of this is that you can hear the 10kHz quite clearly and the 50Hz component amplitude rises and falls as you adjust the potentiometer. The numbers for the sinusoidal duty cycles were calculated by Richard Hayes using octave.
The code makes use of some of STM32 Standard Peripheral Library and avoids the HAL libraries (I’ve had limited success here).
// This program outputs a 50Hz complimentary Sinusoidal PWM signal on PA8 and PB13.
// The switching speed is 10kHz. The program uses a mix of mbed functions and
// direct register writes. It makes use of a lookup table generated in Octave (Thanks Richard Hayes)
// and interrupts to update the duty cycle.
// A potentiometer is attached to A0 and this can be used to control the amplitude modulation index.
// Useful reference: http://stm32.kosyak.info/doc/index.html
#include "mbed.h"
// Define some bitmasks
#define BIT0 (1 << 0)
#define BIT1 (1 << 1)
#define BIT2 (1 << 2)
#define BIT3 (1 << 3)
#define BIT4 (1 << 4)
#define BIT5 (1 << 5)
#define BIT6 (1 << 6)
#define BIT7 (1 << 7)
#define BIT8 (1 << 8)
#define BIT9 (1 << 9)
#define BIT10 (1 << 10)
#define BIT11 (1 << 11)
#define BIT12 (1 << 12)
#define BIT13 (1 << 13)
#define BIT14 (1 << 14)
#define BIT15 (1 << 15)
#define BIT16 (1 << 16)
#define BIT17 (1 << 17)
#define BIT18 (1 << 18)
#define BIT19 (1 << 19)
#define BIT20 (1 << 20)
#define BIT21 (1 << 21)
#define BIT22 (1 << 22)
#define BIT23 (1 << 23)
#define BIT24 (1 << 24)
#define BIT25 (1 << 25)
#define BIT26 (1 << 26)
#define BIT27 (1 << 27)
#define BIT28 (1 << 28)
#define BIT29 (1 << 29)
#define BIT30 (1 << 30)
#define BIT31 (1 << 31)
DigitalOut myled(LED1);
const int duties[]={\
50,51,53,54,56,57,59,60,62,63,65,66,68,69,71,72,74, \
75,76,78,79,80,81,83,84,85,86,87,88,89,90,91,92,93,\
93,94,95,95,96,97,97,98,98,98,99,99,99,99,99,99,100,\
99,99,99,99,99,99,98,98,98,97,97,96,95,95,94,93,93,\
92,91,90,89,88,87,86,85,84,83,81,80,79,78,76,75,74,\
72,71,69,68,66,65,63,62,60,59,57,56,54,53,51,49,48,\
46,45,43,42,40,39,37,36,34,33,31,30,28,27,25,24,23,\
21,20,19,18,16,15,14,13,12,11,10,9,8,7,6,6,5,4,4,3,\
2,2,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,1,1,1,2,2,3,4,4,\
5,6,6,7,8,9,10,11,12,13,14,15,16,18,19,20,21,23,24,\
25,27,28,30,31,33,34,36,37,39,40,42,43,45,46,48\
};
/*
Pin mappings for Timer 1 (the advanced timer with deadtime)
From: https://developer.mbed.org/users/mbed_official/code/mbed-src/file/a11c0372f0ba/targets/hal/TARGET_STM/TARGET_STM32F1/TARGET_NUCLEO_F103RB/PeripheralPins.c
{PA_8, PWM_1, STM_PIN_DATA(STM_MODE_AF_PP, GPIO_PULLUP, 0)}, // TIM1_CH1 - Default
{PA_9, PWM_1, STM_PIN_DATA(STM_MODE_AF_PP, GPIO_PULLUP, 0)}, // TIM1_CH2 - Default
{PA_10, PWM_1, STM_PIN_DATA(STM_MODE_AF_PP, GPIO_PULLUP, 0)}, // TIM1_CH3 - Default
{PB_13, PWM_1, STM_PIN_DATA(STM_MODE_AF_PP, GPIO_PULLUP, 0)}, // TIM1_CH1N - Default
{PB_14, PWM_1, STM_PIN_DATA(STM_MODE_AF_PP, GPIO_PULLUP, 0)}, // TIM1_CH2N - Default
{PB_15, PWM_1, STM_PIN_DATA(STM_MODE_AF_PP, GPIO_PULLUP, 0)}, // TIM1_CH3N - Default
*/
// Use mbed to configure the relevant pins as PWM outputs;
PwmOut PhaATop(PA_8);
PwmOut PhaABtm(PB_13); // This should be the complement of PA_8
AnalogIn Pot(A0);
volatile float PotValue;
void init(void);
int main() {
init();
while(1) {
myled = 1; // LED is ON
wait(0.1); // 200 ms
myled = 0; // LED is OFF
wait(0.1); // 1 sec
PotValue = Pot;
}
}
int ScaleDuty(int Duty,float factor)
{
float ScaledDuty = Duty;
ScaledDuty = (ScaledDuty - 50) * factor;
ScaledDuty = ScaledDuty + 50;
return ScaledDuty;
}
int index=0;
void TimerISR()
{
TIM1->SR &= ~0x3f; // ack the interrupt
TIM1->CCR1=ScaleDuty(duties[index++],PotValue); // get the next duty
if (index > 199)
index = 0;
}
void init()
{
RCC->APB2ENR |= BIT2+BIT3; // enable GPIOA and GPIOB
RCC->APB2ENR |= BIT11; // enable TIM1
GPIOA->CRH |= BIT3+BIT0; // PA8 output, alternate function
GPIOB->CRH |= BIT23+BIT20; // PB13 output, alternate function
TIM1->CR2 = 0;
TIM1->DIER = BIT0; // Want update interrupt
NVIC_SetVector(TIM1_UP_IRQn,(uint32_t) TimerISR);
NVIC_EnableIRQ(TIM1_UP_IRQn);
TIM1->SR = 0; // Clear flags.
TIM1->CCMR1= BIT6+BIT5+BIT4;
TIM1->CCER = BIT2+BIT0;
TIM1->ARR = 100; // 1MHz = base clock freq. Divide by 100 to get 10kHz.
TIM1->CCR1 = 10; // Low inital duty
TIM1->CR1 |= BIT0; //enable counter
__enable_irq(); // enable interrupts
}